

































































Hi People
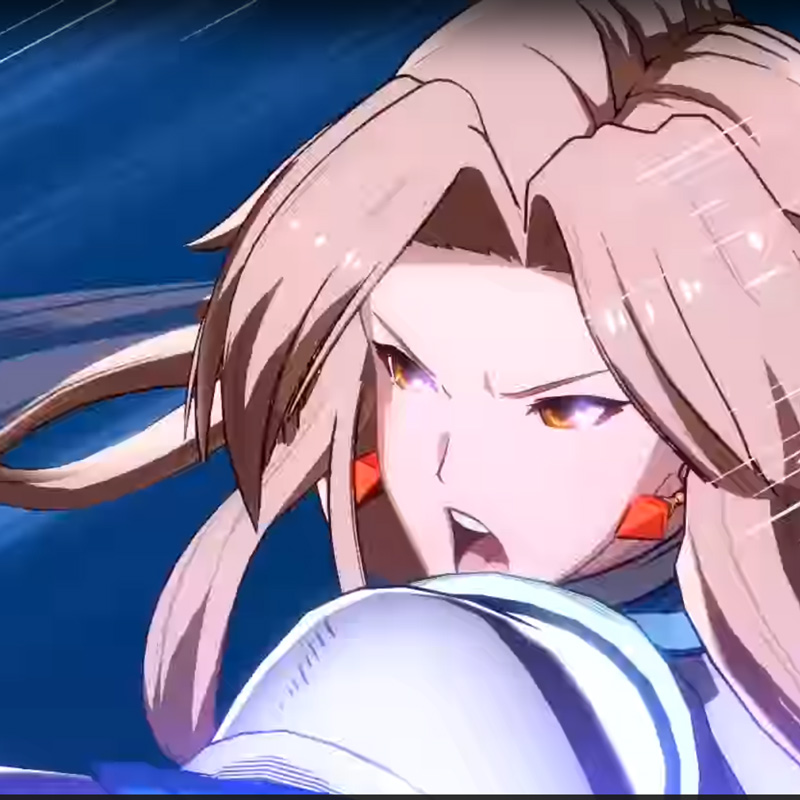
I need to rig an IK robot arm as shown in the attached image.
The problem I have is that I need to constrain the rotations as shown by the red arrows. This means that the shoulder rotation happens in 2 different locations. I know this is easy in FK, but I need it to work in IK with the white null being the effector.
Any Ideas?
[img]robot_arm_rig.jpg[/img]
Robot Arm IK
Robot Arm IK
- Attachments
-
- robot_arm_rig.jpg (84.62 KiB) Viewed 4007 times
Re: Robot Arm IK
I just built this exact IK rig in Lightwave in about 5 mins! No bones, just Nulls with IK switched on for the required rotation.
I'm beginning to think that having to use bone chains for IK is rather limiting, which is especially surprising when I was always told that Softimage was the one to choose when it came to rigging!
Is it only any good for organic, skinned creatures?
I'm beginning to think that having to use bone chains for IK is rather limiting, which is especially surprising when I was always told that Softimage was the one to choose when it came to rigging!
Is it only any good for organic, skinned creatures?
Re: Robot Arm IK
Wow!
Nearly 30 views and no replies!
Is this really that difficult in Softimage?
Nearly 30 views and no replies!
Is this really that difficult in Softimage?

Re: Robot Arm IK
Hi, search the xsi base, this topic has been discussed and rig solved at least 3 times.
This may give you an idea
Out of curiosity, how did you do it in Lightwave?
This may give you an idea
Out of curiosity, how did you do it in Lightwave?
Re: Robot Arm IK
With Lightwave you simply set up each joint to have the required rotation controlled by IK and leave all the others as 'keyframed'. The IK solver then uses the rotations it's allowed to control to best reach the required goal (Effector)!
Re: Robot Arm IK
I've checked out every 'mechanical rigging' or 'robot rigging' posting I could find on the net and I'm sorry, but I don't think any mixture of upVectors is going to solve this!Memag wrote:Hi, search the xsi base, this topic has been discussed and rig solved at least 3 times.
This may give you an idea
I think the only way this is going to work is either SCOPS, Scripting or ICE IK, none of which I particularly relish!
Softimage definitely needs a second IK Solver for mechanical devices. I notice in Max and Maya there is a choice of Solvers.
I hate to say this, but with the upcoming price hike for SI maintenance, plus the shortcomings in it's IK system, 3DS Max is looking better and better!
Re: Robot Arm IK
azurecgi wrote:I've checked out every 'mechanical rigging' or 'robot rigging' posting I could find on the net and I'm sorry, but I don't think any mixture of upVectors is going to solve this!Memag wrote:Hi, search the xsi base, this topic has been discussed and rig solved at least 3 times.
This may give you an idea
I think the only way this is going to work is either SCOPS, Scripting or ICE IK, none of which I particularly relish!
Softimage definitely needs a second IK Solver for mechanical devices. I notice in Max and Maya there is a choice of Solvers.
I hate to say this, but with the upcoming price hike for SI maintenance, plus the shortcomings in it's IK system, 3DS Max is looking better and better!
The "only way" of doing things can be just ONE way of doing particular thing, you counted at least three.
What about bones,setting expressions, constraints and simple parenting? How far did you get in your rig?
And Manny'ssolution didn't help?
Did you post your question on Xsi base, mailing list, area?
Re: Robot Arm IK
The rotation of the blue component when the effector is moved side-to-side on the X axis is the one I can't get to work as it needs to raise the shoulder, therefore altering the root position of the main arm chain in an arc!
I'm sure this can be done eventually, but how many hoops must you jump through?
I just watched a vid on 3DS Max's 'History Independent IK Solver', the guy clicked on the first object in the chain, then the last, and it applied IK to all rotations of all objects. He then clicked through the objects one by one and unticked the rotations he didn't want affected by IK. Easy, and all without bones!
Mannys solution doesn't work for the shoulder rig I am proposing.
I tried putting my query on XSI Base, but as soon as I attempted to upload the screengrab it failed with some obscure error message!
I'm sure this can be done eventually, but how many hoops must you jump through?
I just watched a vid on 3DS Max's 'History Independent IK Solver', the guy clicked on the first object in the chain, then the last, and it applied IK to all rotations of all objects. He then clicked through the objects one by one and unticked the rotations he didn't want affected by IK. Easy, and all without bones!
Mannys solution doesn't work for the shoulder rig I am proposing.
I tried putting my query on XSI Base, but as soon as I attempted to upload the screengrab it failed with some obscure error message!
Re: Robot Arm IK
Sounds great.
Xsi base is an old fella, try uploading it to some upload site and post as [img]link[/img].Works for me.
Also you can ask Manny in the same xsibase thread, I'm sure he will help you out.
Cheers!
Xsi base is an old fella, try uploading it to some upload site and post as [img]link[/img].Works for me.
Also you can ask Manny in the same xsibase thread, I'm sure he will help you out.
Cheers!
Re: Robot Arm IK
The thing is with a LW style approach is that there is not only one position this solve can be in.
By letting the IK work it out for you, you are giving up some control over how this arm will be posed. It is very easy to do this with a constraint and an upvector and I wouldnt really call that a hoop. Its just giving you more control over how the arm is posed. You could approximate what is happening in LW, with a couple of blended constraints or a simple expression, but yeah, XSI doesnt have a per-axis IK solver for any item like LW.
I understand your frustration as I had similar thoughts when I first moved to Soft from Lightwave, trying to make it do the same stuff in the same way. I just adjusted my way of rigging and i have to say I've never looked back.
By letting the IK work it out for you, you are giving up some control over how this arm will be posed. It is very easy to do this with a constraint and an upvector and I wouldnt really call that a hoop. Its just giving you more control over how the arm is posed. You could approximate what is happening in LW, with a couple of blended constraints or a simple expression, but yeah, XSI doesnt have a per-axis IK solver for any item like LW.
I understand your frustration as I had similar thoughts when I first moved to Soft from Lightwave, trying to make it do the same stuff in the same way. I just adjusted my way of rigging and i have to say I've never looked back.
Re: Robot Arm IK
Hi PoobyPooby wrote:The thing is with a LW style approach is that there is not only one position this solve can be in.
By letting the IK work it out for you, you are giving up some control over how this arm will be posed. It is very easy to do this with a constraint and an upvector and I wouldnt really call that a hoop. Its just giving you more control over how the arm is posed. You could approximate what is happening in LW, with a couple of blended constraints or a simple expression, but yeah, XSI doesnt have a per-axis IK solver for any item like LW.
I understand your frustration as I had similar thoughts when I first moved to Soft from Lightwave, trying to make it do the same stuff in the same way. I just adjusted my way of rigging and i have to say I've never looked back.
Could you explain a little further how you would solve this particular problem? I'm at the end of my tether with it and see that I basically have 2 options;
1. Fire up my old LW and do it in there, but then I know I will hit other brick walls with the other parts of this animation.
2. Call it a day with Softimage, and do what I think Autodesk is pushing towards and crossgrade to 3DS Max.
Cheers
Re: Robot Arm IK
I would make you a scene but I have gone home now.
First I would make the shoulder part using a direction constraint to a fixed null bu use the upvector option in the constraint for thesingle axis up and down motion that you want. you will need to add a null for the upvector
Next I would use a 2d chain for the main arm. The root would be position constrained to the end of the shoulder item.
If you wanted an automatic up and down on the shoulder, you'd have to use linkwith on the upvector nulls up and down movement linked to the effectors up and down movement.
Sorry if thats not very clear.it's off the top of my head and I'm tapping this in on an iPhone but I can do you a scene tomorrow.
First I would make the shoulder part using a direction constraint to a fixed null bu use the upvector option in the constraint for thesingle axis up and down motion that you want. you will need to add a null for the upvector
Next I would use a 2d chain for the main arm. The root would be position constrained to the end of the shoulder item.
If you wanted an automatic up and down on the shoulder, you'd have to use linkwith on the upvector nulls up and down movement linked to the effectors up and down movement.
Sorry if thats not very clear.it's off the top of my head and I'm tapping this in on an iPhone but I can do you a scene tomorrow.
Re: Robot Arm IK
Yes please!Pooby wrote:I would make you a scene but I have gone home now.
First I would make the shoulder part using a direction constraint to a fixed null bu use the upvector option in the constraint for thesingle axis up and down motion that you want. you will need to add a null for the upvector
Next I would use a 2d chain for the main arm. The root would be position constrained to the end of the shoulder item.
If you wanted an automatic up and down on the shoulder, you'd have to use linkwith on the upvector nulls up and down movement linked to the effectors up and down movement.
Sorry if thats not very clear.it's off the top of my head and I'm tapping this in on an iPhone but I can do you a scene tomorrow.
Cheers
Re: Robot Arm IK
I saw your response to Mannys video on XSI base. To be honest, his solution is quite similar to my suggestion.
I do see what you mean though about trigonometry. I think I overlooked the automatic rotation of the shoulder joint if you move the effector 'away'.
It seems strange to me that Softimage is struggling here. I havent had a need to do this before, but experimenting today I have to say the IK joint rotation limits dont seem to be working as advertised.
I'll post it on the mailing list and see if someone else can help.
I do see what you mean though about trigonometry. I think I overlooked the automatic rotation of the shoulder joint if you move the effector 'away'.
It seems strange to me that Softimage is struggling here. I havent had a need to do this before, but experimenting today I have to say the IK joint rotation limits dont seem to be working as advertised.
I'll post it on the mailing list and see if someone else can help.
Re: Robot Arm IK
It's a real shame!
I've been dithering about dropping Lightwave and moving completely over to Softimage for a while now (although that was before the price rise shocker), but I do a mixture of medical and mechanical animation work!
Softimage has been amazing for the medical stuff, with ICE particles and deformers, plus polygonizer, but it seems really weak when it comes to the mechanical IK stuff.
My main upcoming project is a couple of robot arms assembling a diesel engine, so IK will be essential for a speedy and flexible animation workflow. I just don't think I can move forward with this in Softimage
I've been dithering about dropping Lightwave and moving completely over to Softimage for a while now (although that was before the price rise shocker), but I do a mixture of medical and mechanical animation work!
Softimage has been amazing for the medical stuff, with ICE particles and deformers, plus polygonizer, but it seems really weak when it comes to the mechanical IK stuff.
My main upcoming project is a couple of robot arms assembling a diesel engine, so IK will be essential for a speedy and flexible animation workflow. I just don't think I can move forward with this in Softimage
-
EricTRocks
- Moderator
- Posts: 754
- Joined: 25 Nov 2009, 01:41
- Contact:
Re: Robot Arm IK
I posted my version of this to the XSI List and attached here too. Not 100% pretty but gets the job done.
- Attachments
-
- RobotArm.zip
- (27.1 KiB) Downloaded 126 times
Who is online
Users browsing this forum: No registered users and 27 guests